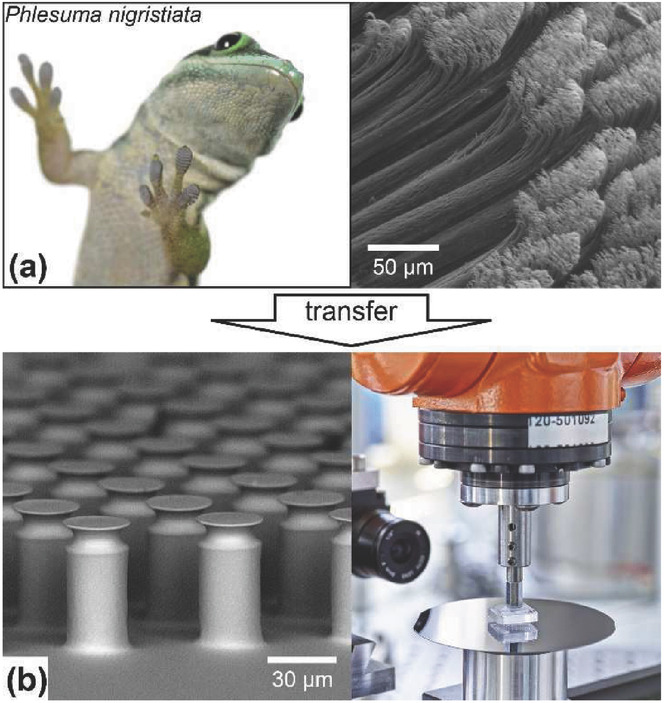
Geckos can climb the steepest walls and even walk upside down on a ceiling using adhesion forces (Van-der-Waals interactions) that exist between the tiny hairs on their feet and the surface they are navigating. Excellent fundamental research carried out at the Leibniz Institute for New Materials (INM) led to the application of this principle to special polymers. This was the beginning of INNOCISE and the start of the successful transfer of Gecomer® technology from research to industry.
Technology transfer
Millions of tiny hair on their feet enable the geckos to adhere to various surfaces.
They use intermolecular interactions that arise between two polarizable molecules.
INNOCISE uses this principle for grippers made of special polymers that can be integrated into various automation units.
Gripping with Van der Waals Forces
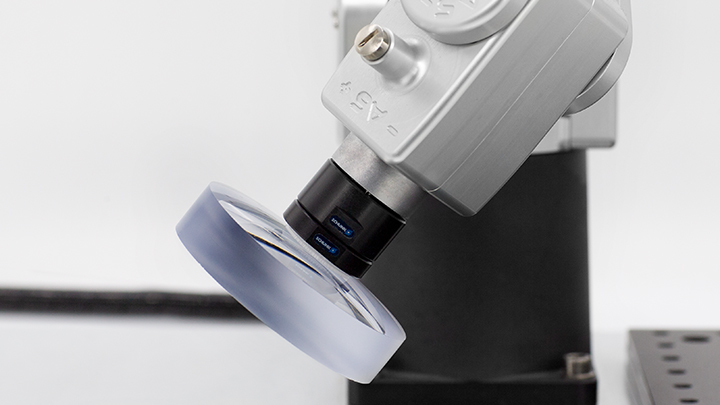
INNOCISE grippers use van der Waals forces by creating close contact between their surfaces (made of tiny fibers or structures) and the object’s surface. This close contact allows intermolecular forces to generate enough adhesion to grip the object. The gripper holds and moves the object by maintaining this contact and releases it by reducing the contact area, often through shearing, rotating, or bending.
Automated Picking and Placing
Picking Process
To grip and lift the component, the pillars of the adhesive structure are gently pressed onto the component surface. The contact between these two surfaces activates the Van-der-Waals forces and the component can be handled safely.
Placing Process
To place a component, the contact area is reduced by a short movement of the pillars. The Van-der-Waals forces are minimized, and the component is released. Different release methods can be used: pushing the pillars further down until they bend (buckling), sliding or rotating the gripper.
Manual Picking and Placing
Picking Process
To grip and lift the component, the pillars of the adhesive structure are gently pressed onto the component surface. The contact between these two surfaces activates the Van-der-Waals forces and the component can be handled safely.
Placing Process
To place a component, the contact area is reduced by a short movement of the pillars. The Van-der-Waals forces are minimized, and the component is released. Different release methods can be used: pushing the pillars further down until they bend (buckling), sliding or rotating the gripper.
Objects of which size can be handled?
INNOCISE grippers are capable of handling and holding components from several meters to less than 10 microns with the highest precision and maximum efficiency
An adhesion force of up to 1 kg/cm2 is achieved.
Industries & Applications
INNOCISE grippers can be used in a wide range of industries on a variety of components. Please find more information under Industries.
The right combination of microstructure geometry, gripper material, gripping surface and carrier structure allows us to adapt our adhesive grippers to different specifications.
A synthetic, reversible adhesion system based on a gecko foot delivers impressive results, in particular for MICROHANDLING. Inspired by nature, the physical principle utilised leaves sensitive surfaces intact, conserves resources and can be used with no size restrictions.
Our industrial society is shifting from standardised products towards increasingly individual products tailored to customer needs. The increasing levels of automation and miniaturisation that contribute to companies’ profitability these days contrast with the growing demands for product flexibility and individuality. Appropriate handling approaches play a central role in these developments.
Publication of the INM - Leibniz Institute for New Materials
Engineering Micropatterned Dry Adhesives: From Contact Theory to Handling Applications
Reversible adhesion is the key functionality to grip, place, and release objects nondestructively. Inspired by nature, micropatterned dry adhesives are promising candidates for this purpose and have attracted the attention of research groups worldwide. Their enhanced adhesion compared to nonpatterned surfaces is frequently demonstrated.
An important conclusion is that the contact mechanics involved is at least as important as the surface energy and chemistry. In this paper, the roles of the contact geometry and mechanical properties are reviewed. With a focus on applications, the effects of substrate roughness and of temperature variations, and the long-term performance of micropatterned adhesives are discussed.
The paper provides a link between the current, detailed understanding of micropatterned adhesives and emerging applications.
Skalierbare cyber-physische Produktionssysteme zur Montage von Brennstoffzellen-Stacks
Manuelle Montageprozesse für Brennstoffzellen-Stacks (BSZ) werden häufig noch von Fachkräften durchgeführt. Automatisierte Montagelinien für BSZ-Stacks sind derzeit nur vereinzelt und prototypisch im industriellen Einsatz.
Ein Teilziel des Forschungsprojektes (FP) ist die Entwicklung einer manuellen Montage, in der der Mitarbeiter kognitiv entlastet und der Einsatz weniger hochqualifizierter Mitarbeiter ermöglicht wird.
Ein Teilziel ist die Entwicklung einer teilautomatisierten Montagelinie durch Integration von Technologien zur Mensch-Maschine-Interaktion und eines Systems zur proaktiven Qualitätssicherung.
Ein Teilziel des FP ist es, zusammen mit Ausrüstern, Anwendern und Instituten eine automatisierte Linie zur Stackmontage zu entwickeln und zu betreiben.
InnoMat
Erstmalige Entwicklung eines bioinspirierten innovativen
Greifsystems zur Fertigung von Batterien und Brennstoffzellen mit neuen Materialien (InnoMat)
Der wesentliche Inhalt des Projektes InnoMat umfasst die Entwicklung und Charakterisierung der Gecomer® Technologie zum Einsatz in der Batterie- und Brennstoffzellenfertigung sowie die Prozessintegration der Gecomer® Technik.
Durch ein bio-inspiriertes, INNOvatives Greifen wird die Batteriefertigung und Produktion von Brennstoffzellenkomponenten mit neuen MATerialien revolutioniert – InnoMat.
Das Projekt wird mit Mitteln des Sondervermögens „zur Bewältigung der finanziellen Folgen der Covid-19-Pandemie” in Höhe von bis zu 160.043,70 Euro durch die Staatskanzlei des Saarlandes unterstützt.
GecKI
KI-basierte Objekterkennung und adaptive Steuerung für intelligente, bioinspirierte Robotergreifsysteme zur Einbettung in Industrie 4.0-Umgebungen
In der Produktion nimmt die Anforderung, Prozesse zu automatisieren, immer weiter zu, gleichzeitig wandelt sich die Nachfrage von standardisierten zu immer individuelleren Waren. Eine Lösung dieser Herausforderung ist es, KI-basierter Robotik-Konzepte, die in digitale Wertschöpfungsketten von Industrie 4.0 eingebunden werden, zu erforschen und zu entwickeln. Das Projekt „GecK!” trägt zu dieser Lösung bei, indem Methoden der künstlichen Intelligenz erforscht werden sollen, um ein hocheffizientes Greifsystem für innovative Robotertechnologien zu entwickeln. Ziel ist es, das Greifsystem dazu zu befähigen, Objekte zu erkennen und diese Informationen in eine angepasste Wechselwirkung umzusetzen.
Gecko Life Predict
Lebensdauer-optimierte
Polymerwerkstoffkonzepte für Gecko-inspirierte Haftstrukturen in Robotik-Anwendungen
Der stetig steigende Grad der Automatisierung, der heute wesentlich zur Wirtschaftlichkeit von Unternehmen beiträgt, steht im zunehmend stärkeren Kontrast zur geforderten Individualisierung von Produkten und deren Werkstoffen. Um zukünftig am Markt bestehen zu können, müssen daher Automatisierung und Variabilität von Produktionsstraßen über innovative, robust-funktionale und höchstadaptive Robotik-Konzepte vereint und dabei vollständig in die digitale Wertschöpfungskette von Industrie 4.0 integriert werden, wobei möglichst lange Einsatzzeiträume gepaart mit möglichst kleinen Stillstandszeiten und damit einhergehend die Lebensdauervorhersage eine immer größere Rolle spielen. Ziel des Vorhabens ist es daher Methoden für die Optimierung der Lebensdauer-Performance von innovativen Haftstrukturen für Robotik-Anwendungen in Verbindung mit maßgeschneiderten und nachhaltigen Werkstoffkonzepten zu entwickeln.